









Position Mode (Application class 3)
In this application class, the Drive Object (DO) provides a closed position control loop with its own position interpolation.
In PROFIdrive, two different submodes are possible which allows the controlling device to access motion task parameters using I/O messaging.
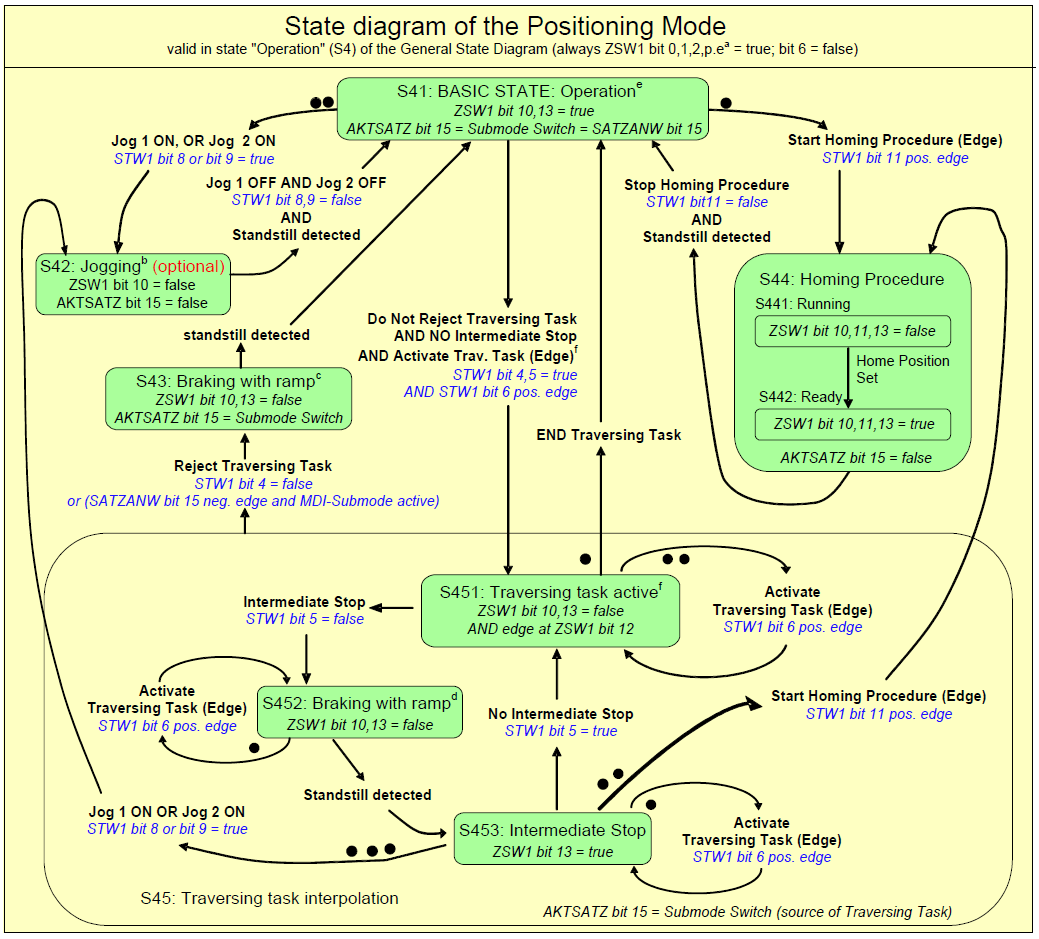
The general state machine of the drive Axis Object is extended to start, configure and stop a motion task and to execute homing procedures.
-
- “ONLY” in state S4 (Operational), the extended state machine can be accessed.
Submode "Program mode"
The Program mode can be used to start/switch to a specific predefined motion task using I/O messaging. Telegram 7 (Standard Telegram 7) or Telegram 9 is used for this purpose. For addressing the motion task signal, SATZANW is used. With signal AKTSATZ the actual running motion task number is read.
Requirements:
- Drive axis state machine needs to be in S4 (Operational)
- SATZANW bit 15 has to be 0 to select “Program mode”
- Operation mode needs to be "Position mode“
- Standard telegram 7 or 9 needs to be configured
- Axis needs to be homed (see Homing).
- Motion task needs to be configured
Start a motion task:
- Set SATZANW to the motion task number to be started.
- Set STW1 bit 4 and 5 to true (Do not reject traversing task and no intermediate stop).
- Set STW1 bit 6 from zero to one. The motion task is activated.
- ZSW1 bit 13 changes from one to zero when the axis starts moving.
- After the target position is reached, ZSW 1 bit 10 is set.
Abort or error in executing motion task:
- If the following error is not in tolerance range, ZSW1 bit 8 is set.
Warning or Fault handling:
- Case of warning, ZSW1 bit 7 is set (See also Statusword Bits (ZSW1))
- Case of fault, ZSW1 bit 3 is set (See also Statusword Bits (ZSW1))
Submode: Manual Data Input (MDI)
The Manual Data Input mode is used to run a motion task directly configured through I/O data. Telegram 9 is used for this purpose and defines the motion task specific signals like acceleration (MID_ACC), deceleration (MID_DEC), velocity (MDI_VEL) and target position (MDI_TAR_POS). The MDI mode is activated by setting bit 15 in signal “SATZANW”.
Requirements:
- Drive axis state machine must be in S4 (Operational).
- Operation mode must be Position mode.
- Standard telegram 9 needs to be configured.
- Axis needs to be homed (ZSW1 bit 11 set, see Statusword Bits (ZSW1).
Run a motion task:
- Set bit 15 in SATZANW to 1
- Configure all setpoint value in telegram 9 like MDI_ACC, MDI_DEC, MDI_MOD etc..
- Set STW1 its 4 and 5 to true (Do not reject traversing task and no intermediate stop).
- Set STW1 bit 6 from 0 to 1, the motion task is loaded.
- ZSW1 bit 12 is set to 1 when the drive has started the new motion task.
- ZSW1 bit 13 is set to 1 when the drive is moving after the target position is reached, ZSW 1 bit 10 is set.
The activation of a new motion task (or traversing task) is done through a hand shake algorithm. After setting the Activate Traversing Task bit 6 in STW1, the signals MDI_TARPOS, MDI_VELOCITY, MDI_ACC, MDI_DEC and MDI_MOD with their current values are loaded into the drive. The Traversing Task Acknowledgment bit 12 in ZSW1 indicates the point in time when the motion task is starting execution.
The figure describes the behavior:
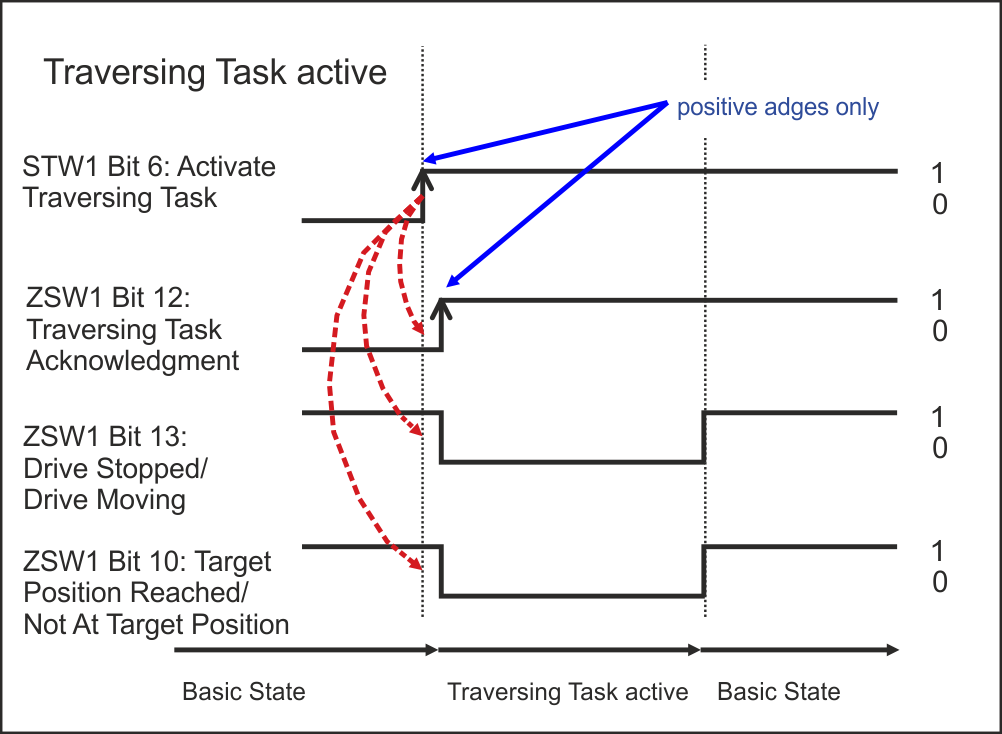
If another motion task is executed before the current motion task has finished (Change on the fly), the Activate Traversing Task Bit in STW1 is directly cleared (after the setting of bit 12 in ZSW1 was detected). In addition, the drive clears bit 12 in ZSW1. After this another motion task is loaded. If an error occurs or the configured motion task cannot be executed, bit 12 in ZSW1 are not set.
Homing
Requirements:
- Drive axis state machine needs to be in S4 (Operational).
- The homing mode needs to be configured using AXIS#.HOME.MODE (P1001).
- No motion task is active or active task is stopped (State S453: Intermediate Stop).
- Operation mode must be Position mode.
Home procedure:
- STW1 bit 11 set to one.
- ZSW1 bit 10, 11 ,13 is set to false if homing is running.
- ZSW1 bit 10,11,13 is set to true if homing is finished.
Abort homing:
- While the homing is running, clear STW1 bit 11.
If the controller aborts a running home procedure or a homing error occurs in the drive, the home position set flag (ZSW1 bit 11) remains cleared.
Warning or Fault handling:
- Case of warning, ZSW1 bit 7 is set.
- Case of fault, ZSW1 bit 3 is set.
Mapping to AKD2G specific commands:
An activation of the homing procedure using STW1 bit 11 corresponds to the AKD2G specific command AXIS#.HOME.MOVE. When the homing procedure is finished, the AKD2G set the bits 2 and bit 4 in AXIS#.MOTIONSTAT. Only if these two bits are set, the PROFIdrive specific homing flag ZSW1 bit 11 (home position) is set.
Jogging
In Position mode, STW1 bits 8 and 9 is used to start a jog move while in state S41 or S453.
These bits work similarly to how they work in Velocity mode:
- Setting only bit 8 activates jog setpoint 1 defined in AXIS#.PROFINET.JOG1V (P5202).
- Setting only bit 9 activates jog setpoint 2 defined in AXIS#.PROFINET.JOG2V (P5203).
- Setting bit 8 and 9 does not change the jog setpoint (but transitions to state S42 if not already in that state).
- Clearing both bits stops the currently active jog and transitions to state S41 once the motor has stopped.
Changing a setpoint by using the Parameter Number (PNU) while that setpoint is active immediately changes the velocity command without having to re-start the jog.
Jogging in position mode uses AXIS#.JOG.ACC and AXIS#.JOG.DEC as acceleration and deceleration.





